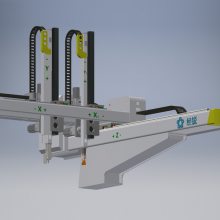
注塑机械手的组成通常由执行系统、驱动系统、控制系统等组成。执行和驱动系统主要是为了完成手臂的正常功能而设计,通过气动或电机来驱动机械部件的运转,达到取物的功能。随着机械手应用的逐渐加深,现在放嵌件、剪切产品胶口和简单装配。智能型注塑机械手,该类型机械手通常包括多点记忆置放、任意点待机、较多自由度等功能,福州大吨位注塑机械手报价,一般采用伺服驱动,能够进行比较大限度的仿人执行比较复杂的操作,还可以通过配备***的传感器,福州大吨位注塑机械手报价,福州大吨位注塑机械手报价,让其具有视觉、触觉和热觉功能,使其成为具有很高智能的注塑机器人。

电气驱动式电力驱动是机械手使用得比较多的一种驱动方式。其特点是电源方便,响应快,驱动力较大(关节型的持重已达400kg),信号检测、传动、处理方便,并可采用多种灵活的控制方案。驱动电机一般采用步进电机,直流伺服电机(AC)为主要的驱动方式。由于电机速度高,通常须运用减速机构(如谐波传动、RV摆线针轮传动、齿轮传动、螺旋传动和多杆机构等)。有些机械手已开始采用无减速机构的大转矩、低转速电机进行直接驱动(DD)这既可使机构简化,又可提高控制精度。机械驱动只用于动作固定的场合。一般用凸轮连杆机构来实现规定的动作。其特点是动作确实可靠,工作速度高,成本低,但不易于调整。其他还有采用混合驱动,即液-气或电-液混合驱动。
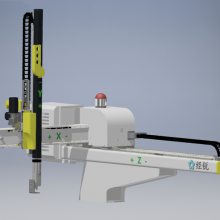
机械手是在机械化,自动化生产过程中发展起来的一种新型装置。它是机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。在现***产过程中,机械手被运用于自动生产线中,机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越多的受到了应用。
厦门经锐精密设备有限公司 手机: 电话: 地址:福建 厦门 厦门市集美区同集南路360号