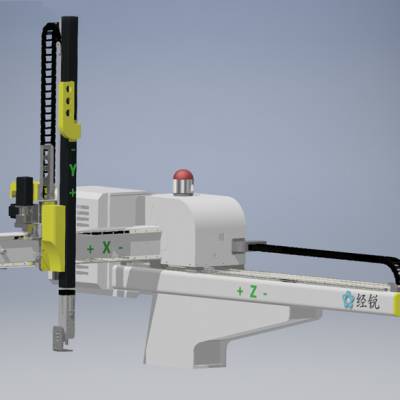
注塑机械手的组成一般由执行系统,福州大吨位注塑机械手批发、驱动系统,福州大吨位注塑机械手批发、控制系统等组成。执行和驱动系统主要是为了完成手臂的正常功能而设计,通过气动或液压动力来驱动机械部件的运转,达到取物的功能。操作者通过人机界面进行操作,在机械手收到注塑机给出的可执行信号时,机械手切断注塑机的可关模信号,***机械手取物的可靠性,在完成取物后机械手恢复注塑机的动作。控制系统的设计难点在于机械手与注塑机的协调工作关系,福州大吨位注塑机械手批发。在控制系统的指挥下,机械手按照预定的工作程序完成各个动作,并且将注塑生产出的制品从模具中取出并传送到***地点或下一个生产工序中。在设计时,应根据注塑机的性能、机械手的作业条件和要求、制品的形状和重量等来确定控制系统。

通用机械手:它是一种具有独立控制系统的、程序可变的、动作灵活多样的机械手。在规格性能范围内,其动作程序是可变的,通过调整可在不同场合使用,驱动系统和控制系统是独立的。通用机械手的工作范围大、定位精度高、通用性强,适用于不断变换生产品种的中小批量自动化的生产。通用机械手按其控制定位的方式不同可分为简易型和伺服型两种:简易型以 “开一关”式控制定位,只能是点位控制: 伺服型具有伺服系统定位控制系统,可以是点位的,也可以实现连续轨迹控制,一般的伺服型通用机械手属于数控类型。
在注塑市场上,各色机械手臂产品一应俱全。不象其它设备,机械手难于被归类和作评估:不同的轴、行程、不一致的规范、以及有限的工业标准,都使得比较变得很困难。潜在买家可以借助一些指南来做出明智的决定。机械手行走的距离就是为人熟知的行程,它的大小与部件尺寸、下降位置和机器形状有关系。为了简便,这个距离通常按三轴定义:在本文我们将利用X、Y和Z三。请注意并不是所有的机械手制造商都是以这种方式来定义行程。一些定义轴的方法不同,而另一些采用了不同的命名习惯。
厦门经锐精密设备有限公司 手机:𐀱𐀲𐀳𐀴𐀳𐀵𐀱𐀴𐀱𐀵𐀶 电话:𐀳𐀷𐀶𐀴𐀸𐀵𐀳𐀵𐀶𐀴𐀳𐀴 地址:福建 厦门 厦门市集美区同集南路360号