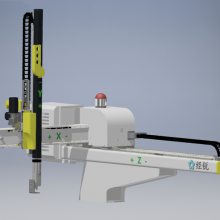
机械手的执行机构分为手部、手臂、躯干;手部安装在手臂的前端。手臂的内孔中装有传动轴,可把运用传给手腕,以转动、伸曲手腕、开闭手指。机械手手部的构造系模仿人的手指,分为无关节、固定关节和自由关节3种。手指的数量又可分为二指、三指、四指等,其中以二指用的比较多。可根据夹持对象的形状和大小配备多种形状和大小的夹头以适应操作的需要。所谓没有手指的手部,通常都是指真空吸盘或磁性吸盘。2、手臂,手臂的作用是引导手指准确地抓住工件,福州经锐机械手报价,并运送到所需的位置上。为了使机械手能够正确地工作,手臂的3个自由度都要准确地定位,福州经锐机械手报价。3,福州经锐机械手报价、躯干躯干是安装手臂、动力源和各种执行机构的支架。

在注塑市场上,各色机械手臂产品一应俱全。不象其它设备,机械手难于被归类和作评估:不一样的轴、行程、不同的规范、和有限的工业标准,都使得比较变得很困难。机械手操纵多重的物品 ,有效载荷是机械手能处理的重量,并被定义如下:有效载荷=部件重量+臂端工具重量 部件重量常因某一特定用途而为人所知;但是,臂端工具就不这样。臂端工具的重量可估计出来,并能从供应商处获得。转矩比有效载荷更为重要。转矩的定义是一个力绕一个轴形成扭转和旋转的趋势,是有效载荷与对机械手枢轴点的距离的函数。为确保机械手能操纵部件,要比较实际转矩和机械手能支持的可用转矩。
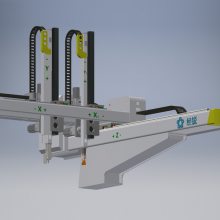
在现今的生活上,科技日新月益的进展之下,机械人手臂与有人类的手臂比较大区别就在于灵活度与耐力度。也就是机械手的比较大优势能够重复的做同一动作在机械正常情况下永远也不会觉得累!机械手臂的应用也将会越来越多,机械手是近几十年发展起来的一种高科技自动生产设备,作业的准确性和环境中完成作业的能力。工业机械手机器人的一个重要分支。按驱动方式可分为液压式、气动式、电动式、机械式。特点是能够通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
厦门经锐精密设备有限公司 手机:𐃔𐃕𐃖𐃗𐃖𐃘𐃔𐃗𐃔𐃘𐃙 电话:𐃖𐃚𐃙𐃗𐃛𐃘𐃖𐃘𐃙𐃗𐃖𐃗 地址:福建 厦门 厦门市集美区同集南路360号