机械手主要由执行机构、驱动机构和控制系统三大部分构成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,厦门射出机机械手批发,改变被抓持物件的位置和姿势,厦门射出机机械手批发。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机械手设计的关键参数。自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。通常专用机械手有2~3个自由度。控制系统是通过对机械手每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,厦门射出机机械手批发,形成稳定的闭环控制。控制系统的**通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能。

厦门经锐精密设备有限公司创建于2013年,公司主要经营:丹麦UR机器人、丹麦MIR移动机器人、加拿大ROBOTIQ 电动夹爪、比利时PICKit 3D视觉、台达四轴机器人、中国台湾APEX精锐机械手、日本FANUC机器人以及周边配套集成自动化的研发及制作。公司是以工业自动化、全厂自动化为主要导向。致力于向客户提供适合客户实际需求的自动化整套解决方案。我们有专业的非标设计人员、技术人员、售后服务人员、销售人员。公司有自已的展厅和展机,欢迎有需求的客户随时到公司参观、指导!
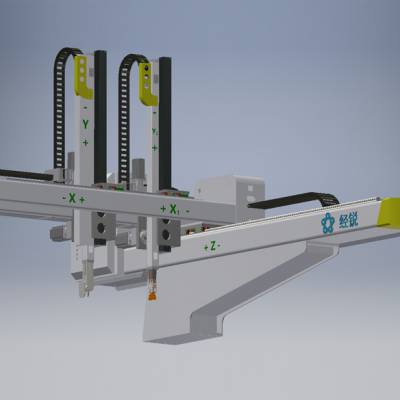
机械手设备:三轴/五轴可同动的CNC控制方式,大幅提高射出机的生产效能。2、超越传统取出机的定位精度在±0.1mm以内,很好的运动重现性与灵活操控性,于取出前、后可搭配各种周边自动化设备的系统连结,可构成随机无人化的境界3、配合周边自动化可做模内埋入、模外剪胶口、修边、模外堆叠、装箱等高精度动作4、完全由手控器数位化调整X.Y.Z各轴行程,配合治具校模每种生产模具只需要校模一次,下次上模完全免设定,直接模组对应即可,很大提升人员的作业效率和可靠性。
厦门经锐精密设备有限公司 手机:𐃯𐃰𐃱𐃲𐃱𐃳𐃯𐃲𐃯𐃳𐃴 电话:𐃱𐃵𐃴𐃲𐃶𐃳𐃱𐃳𐃴𐃲𐃱𐃲 地址:福建 厦门 厦门市集美区同集南路360号