在注塑市场上,各色机械手臂产品一应俱全。不象其它设备,机械手难于被归类和作评估:不一样的轴、行程、不同的规范,福建APEX机械手销售厂家、和有限的工业标准,都使得比较变得很困难。机械手操纵多重的物品 ,有效载荷是机械手能处理的重量,并被定义如下:有效载荷=部件重量+臂端工具重量 部件重量常因某一特定用途而为人所知;但是,福建APEX机械手销售厂家,福建APEX机械手销售厂家,臂端工具就不这样。臂端工具的重量可估计出来,并能从供应商处获得。转矩比有效载荷更为重要。转矩的定义是一个力绕一个轴形成扭转和旋转的趋势,是有效载荷与对机械手枢轴点的距离的函数。为确保机械手能操纵部件,要比较实际转矩和机械手能支持的可用转矩。

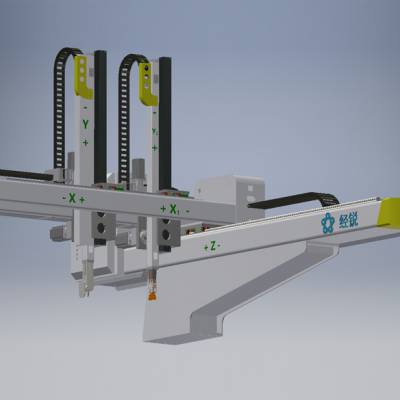
注塑机械手是为注塑生产自动化专门配备的机械,它可以在减轻繁重的体力劳动、改善劳动条件和安全生产;能够模仿人体上肢的部分功能,可以对其进行自动控制使其按照预定要求输送制品或操持工具进行生产操作的自动化生产设备。提高注塑成型机的生产效率、稳定产品质量、降低废品率、降低生产成本、增强企业的竞争力等方面起到很重要的作用。在注塑工业中适用的机械手按其智能程度可以分为基本型注塑机械手和智能型注塑机械手这两种类型。
智能型注塑机械手:该类型机械手一般包括多点记忆置放、任意点待机、较多自由度等功能,通常采用伺服驱动,能够进行比较大限度的仿人执行比较复杂的操作,还可以通过配备***的传感器,让其具有视觉、触觉和热觉功能,使其成为具有很高智能的注塑机器人。械手按其他分类方式分类如下:驱动方式分为气动,变频,伺服。按机械结构分为旋转式,横行式,侧取式。按手臂结构分为单截,双截。按手臂多少分为单臂和双臂。按X轴结构分为挂臂式和框架式。按照控制程序的不同分为多套固定程式和可自主编辑程式。按手臂可移动区分设备大小,一般以100MM递增。注塑机械手组成编辑注塑机械手的组成一般由执行系统、驱动系统、控制系统等组成。执行和驱动系统主要是为了完成手臂的正常功能而设计,通过气动或液压动力来驱动机械部件的运转,达到取物的功能。
厦门经锐精密设备有限公司 手机:𐂀 电话:𐂁𐂀𐂂𐂀 地址:福建 厦门 厦门市集美区同集南路360号